カイトプレーンによるCansat投下試験の実施
3月2日に日本大学さんのグラウンドにて熊本大学さんの企画した「Cansatのカイトプレーンからの投下による動作試験」に参加させていただきました。
この試験では「カイトプレーン」と呼ばれる中型の無人飛行機を用いて高度300mからCansatを投下し、Cansatが所定の動作を実施できるかの検証を行いました。
↓カイトプレーン↓
一般的にCansatの動作試験は直径5mほどのヘリウムガスの気球を用いて行うことが一般的です。これに比べてカイトプレーンを用いた動作試験は以下のメリットがあります。
- 上昇速度が非常に速いために1回あたりの所要時間が短い。つまり投下試験回数を多くこなせる
- 投下位置制御が可能のためCansatのロストの恐れが低い
- 推力・揚力が強力なため、オープンクラスの機体も十分高い高度に持ち上げることができる。(高度1km程度も可能とのことです)
今回の動作実験ではキャリア(Cansatを収納するスペース)がOpenClass(Φ150mm-L240mm-M1050g)のためにG-sat2(Φ94mm-L450mm-M1200g)のフルモデルは収納できないため、リアクションホイールの制御検証に主眼を置いての動作試験を行いました。
この動作試験のためにG-sat2は以下のような機体に改造されます。
左が大島でロケットを打ち上げる際のG-sat2、右が今回カイトプレーンからの投下試験の際のG-sat2です。
自由落下機の機体後部の展開式の翼とノーズを取り外し、機体の直径をOpenclassとなるように調整用のアタッチメントを取り付けてあります。
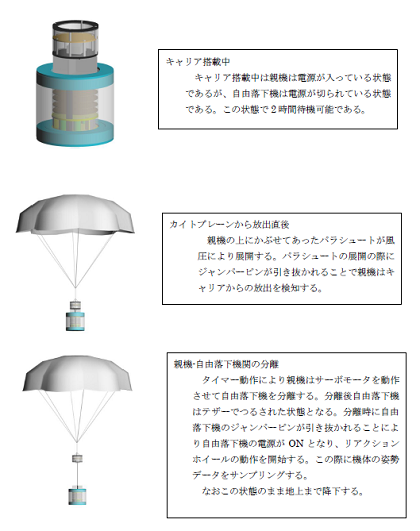
動作シークエンスとしては以下の図のようになっています。
本来は自由落下機は親機から分離されて自由落下を行いますが今回は自由落下前の段階まで動作させテザーでつるされた状態にしリアクションホイールを動作させて自由落下機のR回転の角速度の絶対値が最小となるようにします。これによりG-sat2に搭載しているリアクションホイールの制御則が所定の機能を果たすかを検証します。
実験当日のながれ
実験当日はあいにくの雨でしたがカイトプレーンは小雨で運用が可能とのことで実験を行いました。今回の実験に参加したのは以下の3チームです。
- 熊本大学Cansatチーム
- 東工大CREATEロケット電装班
- 東工大CREATECansat班
各チーム準備が整い次第投下試験を実施しました。
第一回投下:CREATEロケット電装班
第一回目の投下はわれらCREATEのロケット電装班の制作した Cansatです。この機体は本来はロケットのアビオニクスとして制作されたユニットをCansatに組み上げて3月の大島での打ち上げ前の動作試験を実施しました。
↓ロケット電装班Cansat

第二回投下:CREATECansat班
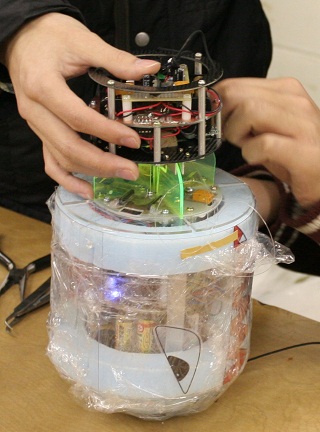
G-sat2の投下試験です。
↓G-sat2(投下試験Ver)
第三回投下:熊本大学Cansatチーム
午前中の1時間半の間に以上の3回の投下を行いました。
本来の予定では午後も6回ほど投下を行う予定でしたが天候が悪くなってきたために中止となりました。
実験結果(第二回投下のG-sat2のみについて)
↓実験の様子
動画にある通りカイトプレーンからの放出およびパラシュートの展開、親機-自由落下機の結合分離(非常に分かりにくいです)の動作が成功しました。また、実験の際にCansat内部の6軸+気圧のセンサデータのサンプリングにも成功しました。
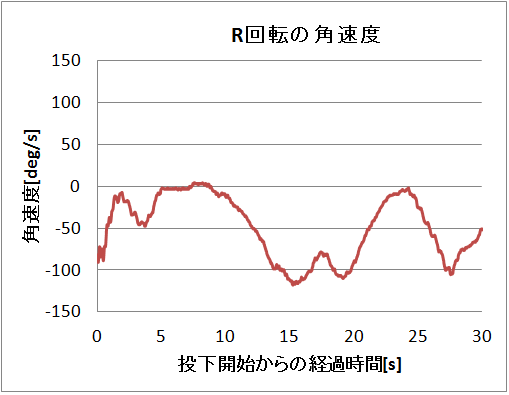
下のグラフが記録されたR回転の角速度データの一部です。
投下開始から0s~10sの間で角速度が減衰し、特に5s~10sにおいてはその絶対値が10deg/sと、非常に低い角速度が維持されています。
一方10s以降では角速度が振動していますが、これはリアクションホイールがフルスロットルとなり機体の回転のフィードバッグを行うために必要なホイールの角速度変化を発生させることが不可能になり、制御の利いていない状態に陥ったためと考えられます。
この結果からG-sat2のリアクションホイールが機体の回転を抑制する効果があることが実証されました。
以上長くなりましたが、投下試験の報告をさせていただきます
Cansat班 PM たなか
最終更新:2012年03月09日 22:03